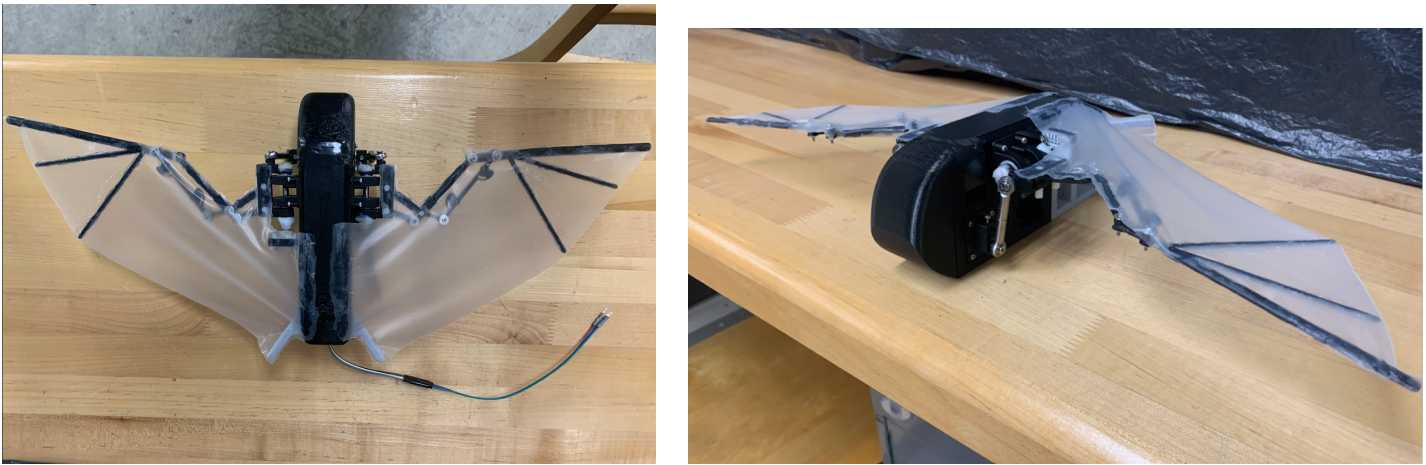
- Bio-inspired Aerial Robot with Shape-morphing Capability
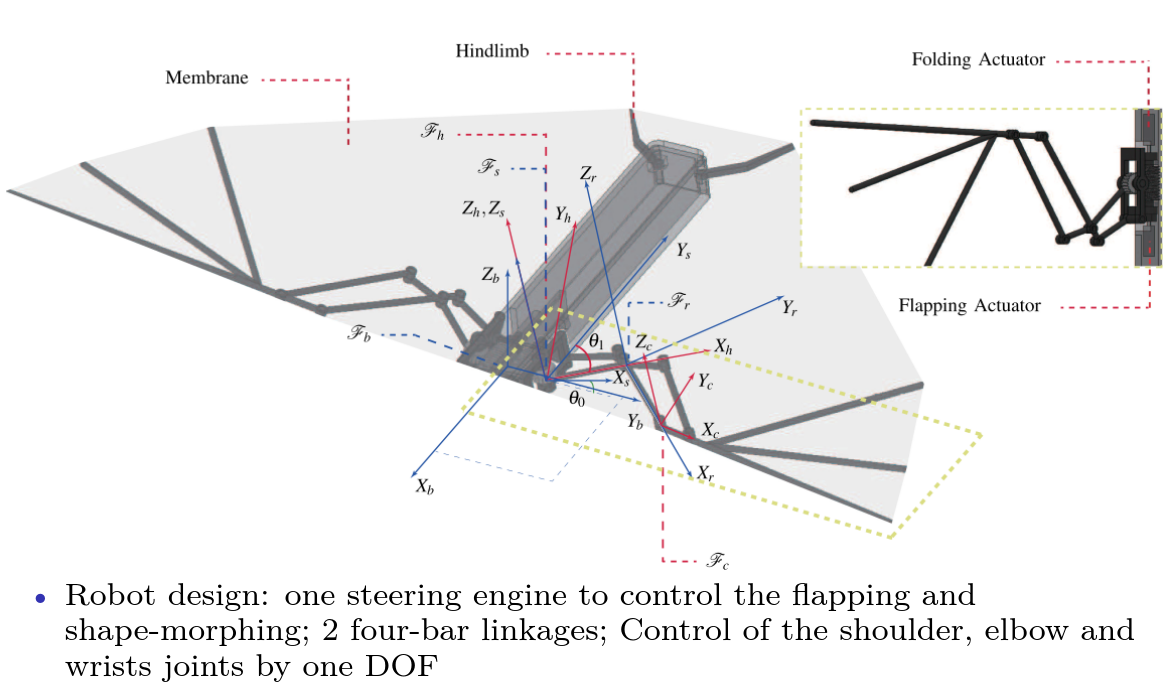
By virtue of distinguished wing shape morphing characteristics, the unrivaled agility and flight maneuverability of some natural fliers have inspired the design of flying robots. The unique flight kinematics, aerodynamics due to shape morphing offer significant advantages over the conventional form of miniature air vehicle in terms of quiet, safe operations, improved efficiency, and enhanced maneuverability. Meanwhile, the complexity involving in the flight of natural fliers pose substantial challenges on bio-inspired robot design. We are developing a brand new bio-inspired aerial robot with shape-morphing capability aiming at enhancing maneuverability and control. Working with a bat zoologist, we proposed a robot design whose wing morphology matches significantly well with that of bats. Wind tunnel tests are underway for the aerodynamic performance optimization. Via training from the bat morphology data, we are working on the intelligent control that enables the robot to autonomously avoid obstacles and adjust flying behaviors using reinforcement learning. Consequently, we propose the design of a self-reconfigurable mobile robot, behaving various configurations, for inspection in confined spaces.
- Opilliones (harvestmen)-like Legged Robot
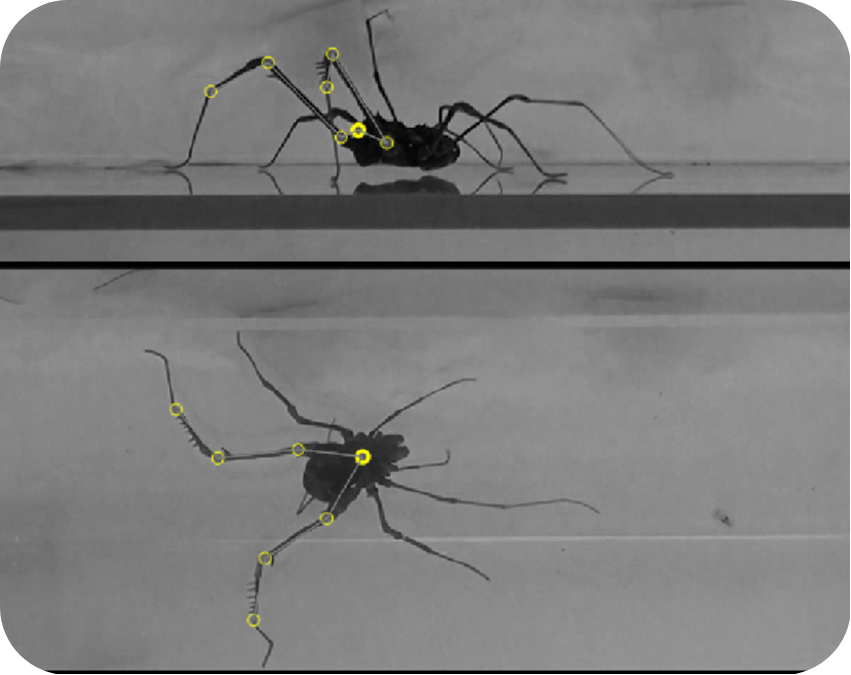
For example, 3D navigation in complex environments without vision, like the caves and underground mines, is challenging for the current state-of-the-art navigation solutions using cameras. We are tying to address the challenge by developing a robot inspired by the Opiliones (harvestmen)—an arthropod living in the Amazon forest that owns sophisticated sensation of the environment using only tactile skills without vision. We are collaborating with zoology scientists from Brazil and Uruguay to investigate the Opiliones behaviors in sensing the outside environments using tactile sensation, and how the sensation is related to their navigation. The robot will be powered by control methods based on the reinforcement learning algorithms, equipped with tactile sensors, for intelligent 3D navigation. The proposed solution provides a robust sensation of environments in addition to LiDar. It also offers distinguished advantages in the terrain sensation, significantly improving robot’s adaptability on multiple complex terrains.

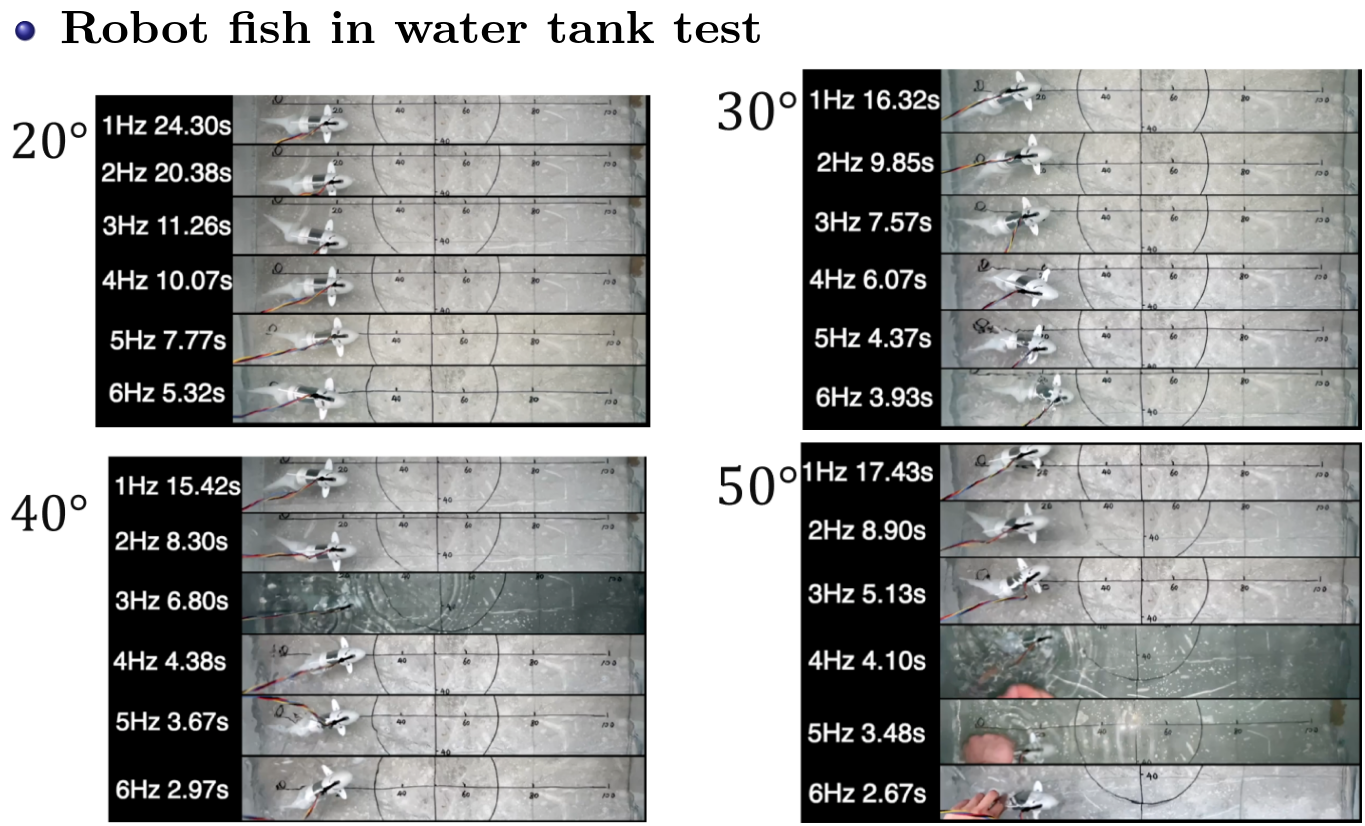
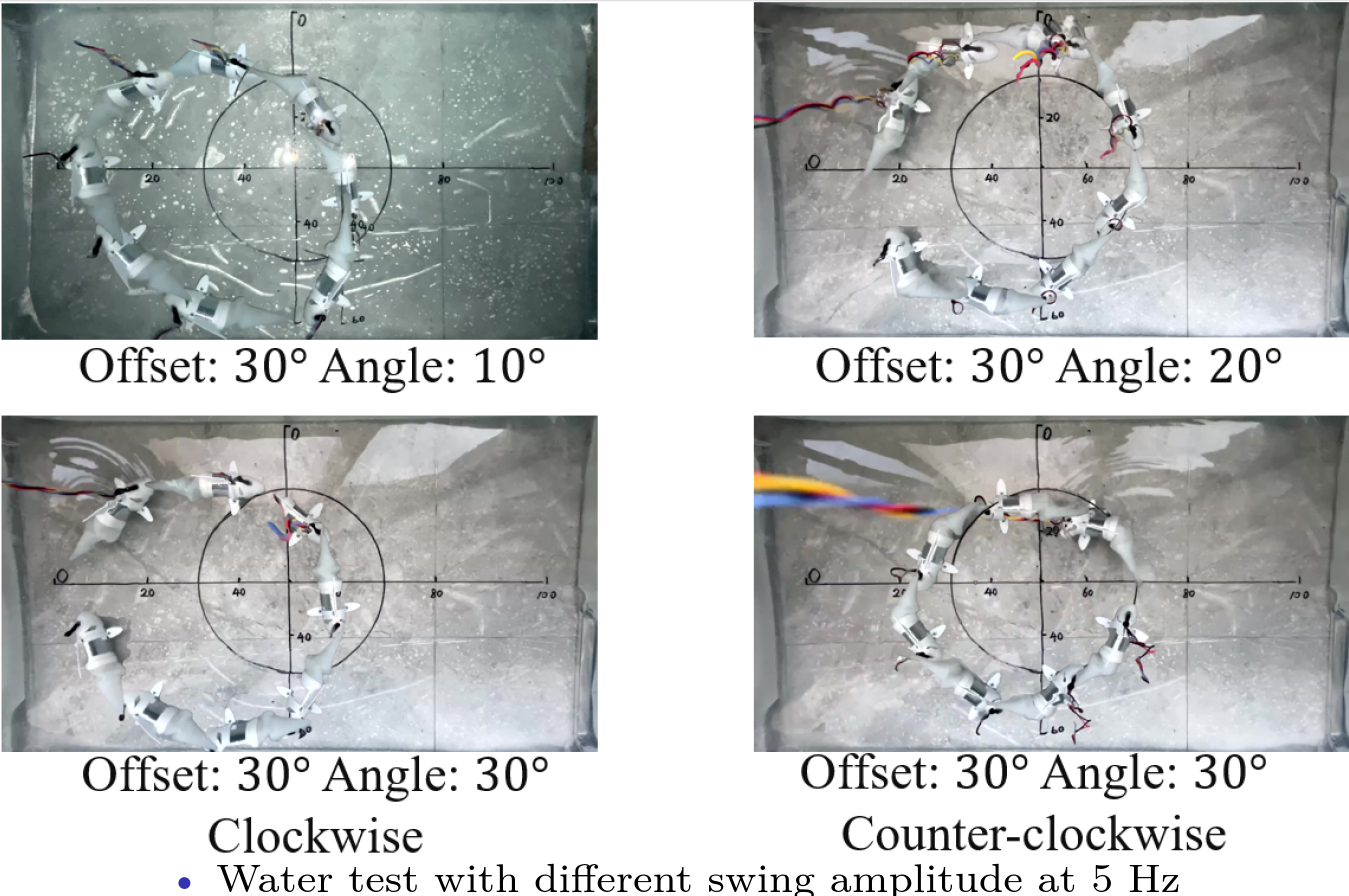
- Robot Fish
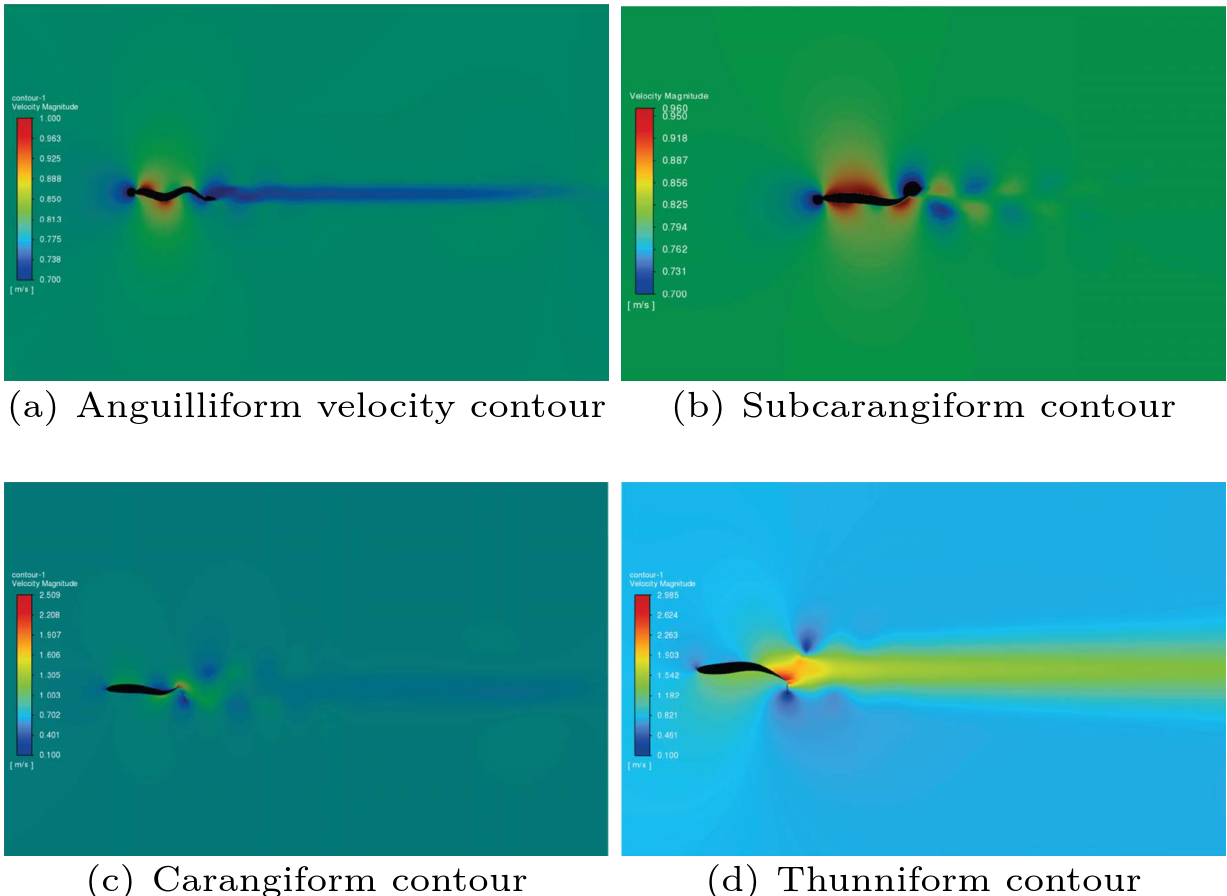
Robot fish has widespread applications and has proven with potentials in multiple fields, e.g., education and entertainment. However, many existing robot fish have complex design and relatively high cost. In this research, we are driven by the needs for robot fish with straightforward design, and low fabrication cost. We investigate the methodology and techniques for a soft biomimetic robot fish that has a straightforward design, relatively simple fabrication, and low cost. In addition to the investigations of fabrication techniques, we also explore the numerical analysis of the biological fish swimming performance, with its inspiration for robot fish design, which is less studied in the literature. In our analysis, various swimming locomotion patterns within the body and/or caudal fin family are analyzed for kinematics and hydrodynamics using analytical methods and computational fluid dynamics (CFD) to inspire the robot fish design for improved swimming performance. We validate the swimming performance of the numerical robot fish using 3D CFD, and the prototype performance is validated using in-water experimental tests. Our research showcases a new easy-to-design and easy-to-fabricate robust biomimetic robot fish with comparable swimming performance, which has good potential for purposes like education, research, and entertainment.