-
Enhancing Leg Odometry in Legged Robots with Learned Contact Bias: An LSTM Recurrent Neural Network Approach
To address the leg odometry drift caused by the non-stationary foot contact, this paper introduces a novel data-driven based leg odometry technique for legged robots. By leveraging a Long Short-Term Memory (LSTM) Recurrent Neural Network (RNN), the method learns the biases in the robot’s foot contact locations from sequential IMU measurements and ground reaction forces (GRF). This learned contact bias is then incorporated into the state estimation process using a Kalman filter (KF), significantly improving the precision of leg odometry for legged robots operating in real time. This method, which combines deep learning approaches with conventional filtering techniques, is named the Deep Learning Kalman Filter (DLKF). The effectiveness of the DLKF is demonstrated through simulation and experimental trials using a Unitree Go1 robot across various challenging environments, including uneven terrain, slopes, and stairs, where foot slippage occurs frequently. Our results indicate an average 64.93% reduction in translational errors in leg odometry when the learned contact bias is applied. Further improvements are observed in a fused LiDAR and leg odometry state estimation system, especially in feature-deprived areas, indicating that the proposed leg odometry system can be easily fused with other sensor measurements to get a more precise state estimation.
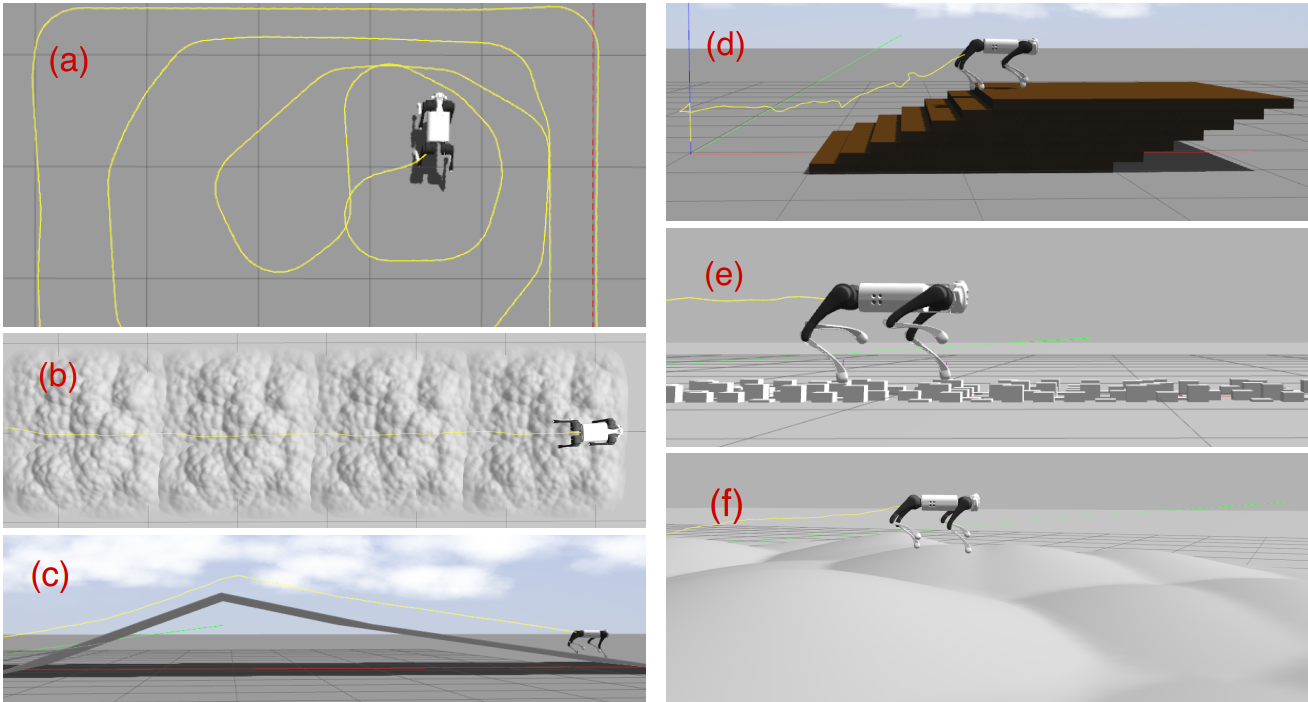

Simulation and Test results
-
Workspace-based Motion Planning for Quadrupedal Robots on Rough Terrain
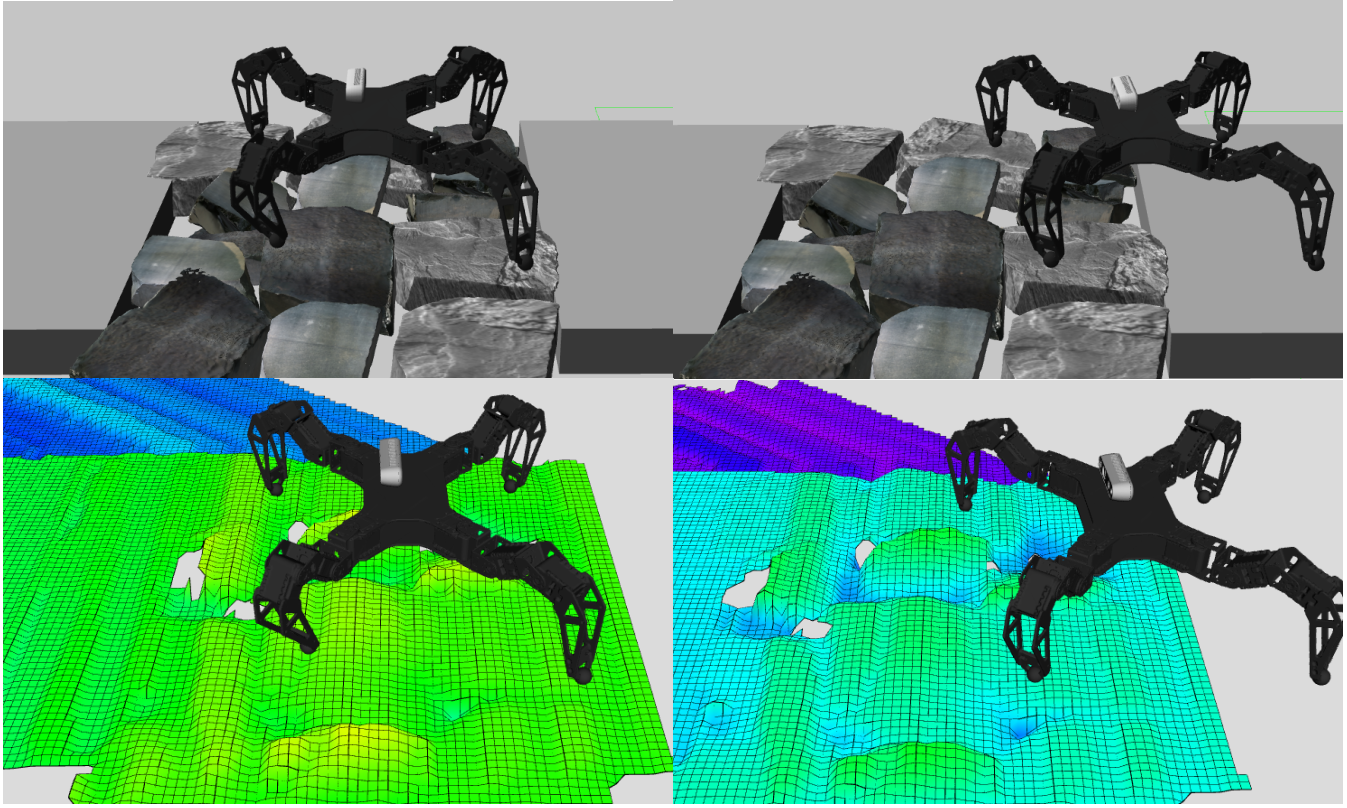
Legged robots have demonstrated high potential when dealing with rough terrain, for which an efficient motion planner becomes crucial. This paper presents a novel approach for quadrupedal robot motion planning on rough terrain, which is both conceptually straightforward and computationally efficient. Implementing the concept of workspace constitutes the cornerstone of this method: both body poses and swing-leg footholds are chosen within their corresponding workspace. A novel approach called “cross-diagonal method” is developed to facilitate the search for new body poses. Based on the obtained body pose, the foothold for a swing leg selected within its foot workspace satisfies the reachability constraint automatically. The proposed motion planning scheme is integrated with an elevation mapping module and a state estimation module, enabling quadrupedal robots to travel through uneven terrains with high efficiency. The significance of this work is validated through simulation and physical experiments with a quadrupedal robot, which achieves high success rates in overcoming difficult terrains without prior knowledge of the environment. This approach offers advantages of high computational efficiency, simplicity, and adaptability to different types of terrains, making it a promising solution for real-world applications.
